| 盤 )、輸出設(shè)備 (數(shù)碼顯示器 LED、監(jiān)視器 CRT、微型 | |||||||||||||||||||||||||||||||
| 打印機 )、輸出控制設(shè)備等。 | |||||||||||||||||||||||||||||||
| 1. 1 單片機接口的復(fù)用技術(shù) | |||||||||||||||||||||||||||||||
|
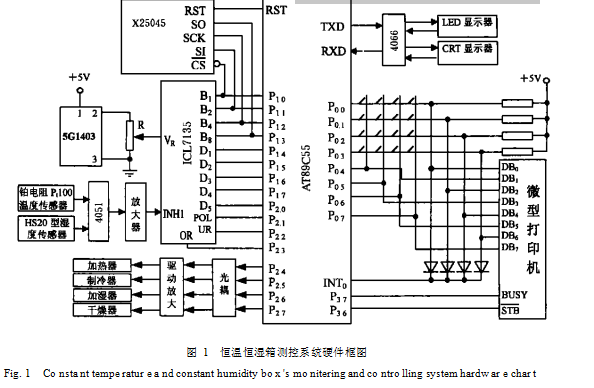
AT 89C系列單片機共 4個接口 ( P0、 P1、 P2、 P3 )32位 ,本系統(tǒng)所需的接口如下: 4× 4鍵盤占 8位; A /D轉(zhuǎn)換器 7135需 12位; 微型打印機 10位; 監(jiān)視器 CRT(串口 ) 2位; 12位數(shù)碼顯示器 LED 需 20位 I / O 口 (用并行口 , 12位 , 8段 ); 輸出控制位 4位; 2 個控制二選一轉(zhuǎn)換開關(guān) 4066需 2位; 中斷 2位; X25045需 4位 ,故共需 64位 I /O 口。如擴展 I /O 口 則將使系統(tǒng)變得既龐大、又雜復(fù)。本文使用單片機接口的復(fù)用技術(shù) ,可以使系統(tǒng)大大簡化。在復(fù)用技術(shù)中應(yīng)遵循兩條原則: 除了輸出控制位之外 ,其它 I /O 口位都可以使用復(fù)用技術(shù); 充分利用單片機接口各位 ,只有到單片機本身接口不夠使用時才使用接口復(fù)用技術(shù)。 1. 1. 1 CRT 監(jiān)視器與 LED顯示器共用串口 如果不用接口復(fù)用技術(shù) ,單片機與 PC機的通訊用了串口 ( 2位 ) , LED顯示就只能用并口動態(tài)顯示 ( 10+ 8= 18位 ) ,總共需 20位。本系統(tǒng) LED 顯示采用通過串入并出接口 74LS164實現(xiàn)靜態(tài)顯示。如圖 1所示 ,只要用單片機的 1位作二選一開關(guān) 4066 的控制位 ,亦即只用單片機的 3位 ,就達到了使兩種顯示器共用串口的目的。 這樣既節(jié)省了 I /O 口 ,也節(jié)省了為 LED動態(tài)顯示 CPU 所花費的時間。 1. 1. 2 鍵盤與微型打印機共用 P0 口 鍵盤輸入接口與微型打印機輸出接口共用 P0 口 , 鍵盤再用到中斷口 IN T0 , 微型打印機再用到 W R、 RD信號位即可使兩者互不影響。 1. 1. 3 2045與 ICL 7135共用 P1 口 本系統(tǒng)所采用的 A /D 轉(zhuǎn)換器如圖 1所示的 ICL 7135是四位半雙積分 A /D轉(zhuǎn)換器。 它具有抗干擾性能好 ,轉(zhuǎn)換精度高 (相當于 14位二進制數(shù) ) , 自動校零 ,動態(tài)字位掃描 BCD碼輸出 ,單基準電壓 , 價格低廉等特點。雖然它的轉(zhuǎn)換速度較慢 ,但本系統(tǒng)所控的對象—— 溫濕度變化都是緩慢的量 ,是足夠的了[2 ]。 它占用 P1 口 8位 , P2 口 4位。 X25045芯片把 3種常用功能—— 看門口定時器、電壓監(jiān)視和 E2 PROM 組合在單個封裝之內(nèi) ,這種組合降低了系統(tǒng)成本并減少了對電路板空間的要求。 其中 4096位串行 E2 PROM 是按 512× 8組織的 ,是提高系統(tǒng)可靠性及自動化標定與校準的硬件 基礎(chǔ)[4 ]。 ICL7135與 X 25045是分時與 CPU 聯(lián)系的 ,二 者復(fù)用 P1 接口。 前者雖然是連續(xù)工作 ,但取數(shù)卻是程序控制。 X25045的工作有嚴格的時序 ,理論分析與工作實踐都證明 , IC L7135的連續(xù)工作不會影響 X 25045的工作。 1. 2 信號處理通道設(shè)計 測控系統(tǒng)檢測精度的高低在很大程度上取決于信號處理通道的設(shè)計質(zhì)量。 1. 2. 1 傳感器 本系統(tǒng)采用了穩(wěn)定性、重復(fù)性和線性度都較好的鉑電阻 Pt100溫度傳感器和 HS20型 (日本 )濕度傳感器。高精度傳感器是提高檢測精度的重要保證。 1. 2. 2 通過采樣參考值以消除系統(tǒng)漂移 通過多路模擬開關(guān) ,兩個傳感器和參考電阻的信號處理共用一個多路開關(guān) 4051放大電路和 A / D 轉(zhuǎn)換電路 ,通過對參考電阻的采樣與處理 ,既簡化了系統(tǒng) ,又基本消除了系統(tǒng)的漂移 ,從而提高了檢測精度。 2 系統(tǒng)軟件設(shè)計 整個恒溫恒濕箱控制系統(tǒng)是在應(yīng)用程序的控制下執(zhí)行的 ,應(yīng)用程序由主程序、數(shù)據(jù)巡回采集及處理子程序、 PID 調(diào)節(jié)子程序、鍵盤中斷服務(wù)程序、打印子程序及定時中斷服務(wù)程序等組成。 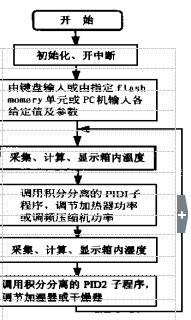 2. 1 主程序 2. 1 主程序主程序流程圖
選用 本系統(tǒng)所采用的控制方法是 PID 控制方法 [3 ]。用現(xiàn)有的同類產(chǎn)品實現(xiàn)低溫下恒溫控制 ,需要將壓縮機全速全功率運行 (因為壓縮機不允許頻繁起動 ) ,然后用加熱器進行 PID調(diào)節(jié)保持恒溫。這無疑 |

| 其控制算 | 圖 3 PID運算流程圖 | ||
| 式為 | Fig | . 3 | PID o per atio n flo w char t |
| > XPD(比例微分 ) 運算 | |||
| ei = w - | yi ≥ XPID(比例積分微分 ) 運算 | ||



